












基于NI PXI平台实现针对无框力矩电机、空心杯电机等多类型电机MCU的快速原型仿真和低成本硬件在环测试

2025-09-03
NI主控、电机与机械部件核心测试方案拆解
主控系统是机器人的大脑,负责其智能与决策,其电机提供运动能力的强大肌肉,而其复杂的机械部件则构成了赋予其结构的坚韧骨骼。确保这套“大脑、肌肉与骨骼”系统的安全性、可靠性与最佳性能是重中之重。NI提供灵活、可扩展且开放的解决方案,全面赋能机器人主控、电机与机械部件的测试。
无框力矩电机与空心杯电机是人形机器人中关键的执行部件,分别应用于大关节的直接驱动(如肩、肘、髋等)和精细部位的动作控制(如手指、手腕、头部等)。
前者具有高扭矩和零背隙优势,适用于动态运动和平衡控制,后者则以体积小、响应快的特点,满足高精度、轻量化的控制需求。对这类电机MCU进行硬件在环(HIL)测试至关重要,它可以在不依赖真实电机的前提下,仿真电机动力学响应,验证控制算法的稳定性与鲁棒性,确保在异常工况下依然安全可靠运行。
用户反馈仿真电机时,市面上各类专有电机模型仿真软件许可证昂贵,且不一定适用。因此,许多客户会选择使用Simulink进行自定义特殊模型仿真。

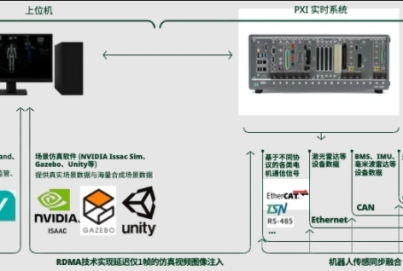
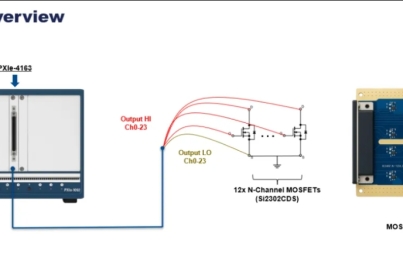
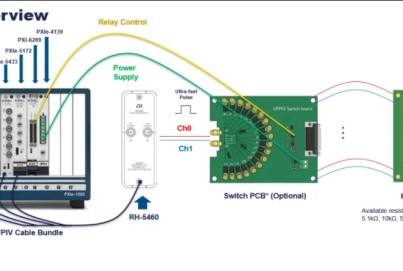
图1:人形机器人电机快速原型仿真系统与电机MCU HIL测试系统架构
NI的电机MCU HIL测试系统允许用户通过VeriStand将Simulink、C/C++、LabVIEW等不同工具开发的电机模型部署在PXI系统上,无需额外采购昂贵的电机仿真软件或另搭平台,大大节省成本和加速验证。
用户如需进行快速原型仿真,还可选择通过 FPGA 将 MCU 算法部署在 PXI 实时系统中。通过灵活的配置,用户可实现真实MCU控制真实电机,真实MCU控制仿真电机(如Simulink电机模型),仿真MCU控制真实电机,仿真MCU控制仿真电机四种测试模式。
另外,此架构也支持域级多电机的联调,人形机器人各部件和系统间的通信大多采用EtherCAT或Ethernet协议,主控板作为主站与各电机MCU从站通信,用户可以在一台NI PXI系统上仿真主站信号,而被测件从站可根据测试需求配置单个电机MCU或域级多个电机MCU。这样的测试配置方式下,用户可在同一平台下进行不同项目的测试。
随着机器人技术的不断发展,对测试的要求也必会日益提升。只有通过完善而高效的测试体系,才能确保机器人在复杂多变的应用场景中始终保持卓越表现。借助NI 的创新测试平台,企业不仅能够加速产品迭代,还能在安全性与可靠性上赢得更大优势,为人性机器人行业的未来发展奠定坚实基础。




最新资讯